
航空機製造におけるデジタル精度
Ensenso 3Dカメラにより、取り付け位置の精密な位置決めが可能に
en.ids-imaging.com
設計から生産までをつなぐデジタルプロセスチェーン
本プロジェクトの目的は、設計から生産までをつなぐ連続したデジタルスレッドを確立することです。座席間隔の変更や、それに伴う荷物棚の新たな配置など、キャビン設計の変更はデジタル設計データに直接記録され、自動的に生産計画へ反映されます。シミュレーションにより、物理的な部品を製造する前に設計バリエーションの妥当性を検証できます。デジタル検証が完了次第、直ちに生産を開始できます。
このデジタルプロセスを具現化するため、航空機フレーム構造のモックアップ上で、自動化されたドリル位置マーキングシステムが開発されました。この仕組みでは、複数のネットワーク化されたシステムが連携しています:自律走行ロボット(AMR)がフレームに接近し、対象エリア付近で停止します。AMRには軽量ロボットが搭載されており、3Dカメラを含むマーキングユニットを撮像位置まで移動させます。ここで、Ensensoカメラが微調整を引き継ぎます。統合された製造実行システム(MES)が、すべてのサブプロセスを管理します。
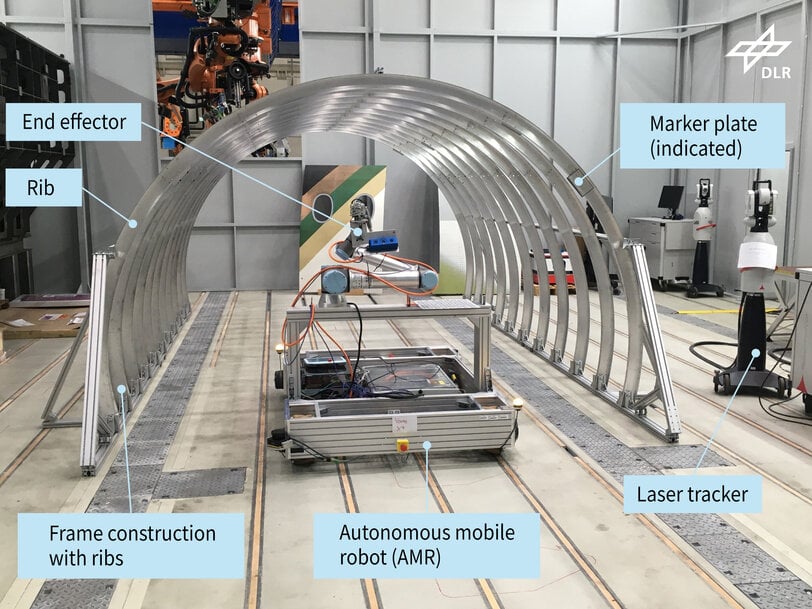
フレーム構造および上部構造を含む移動ロボット
3Dカメラの役割
使用されているEnsenso N36カメラは、周囲環境を3次元点群として捉え、それを航空機フレームのCADデータと照合します。このようにして、目標モデルと実際の形状とのわずかな差異さえも検出することが可能です。システムはこのデータを用いて正確な補正値を算出し、その値を上位 MES へ送信します。通信は標準化されたOPC UAインターフェースを介して行われ、カメラ、ロボット、制御システム間の信頼性の高い安全なデータ交換を保証します。MESは取得したデータを具体的な制御コマンドに変換し、ロボットがそれに基づいてドリル位置のマーキングを行います。
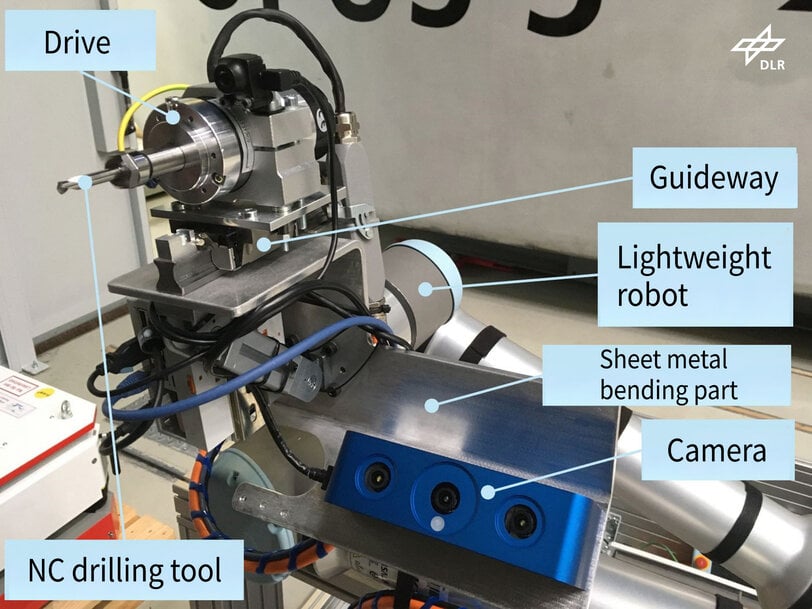
マーキングユニットと3Dカメラを備えた軽量ロボット
自律型ロボットは、約5ミリメートルの位置決め精度を実現しています。これにより、カメラは衝突リスクなく撮像位置へ移動できます。
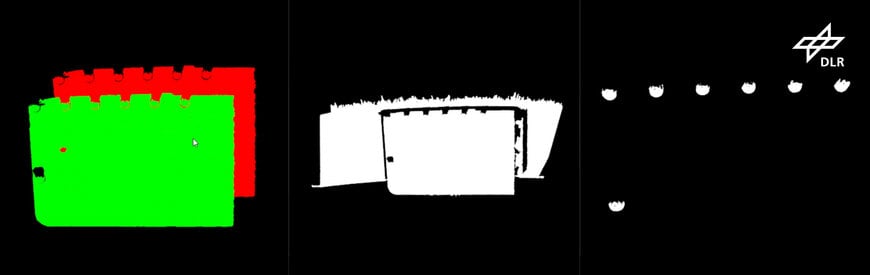
Ensensoカメラは、デジタル設計と実世界の製造を結ぶ鍵となります。このカメラは局所的な形状を認識します。この例では複数のリベットとその取り付け面を認識し、取得した点群データをCADの参照データと比較します。この比較は、ハンドアイキャリブレーションや反復的な最小化処理などによって実現されています。その結果、穴あけ位置に必要な補正を正確に記述する変換行列が得られます。この補正値を適用することで、穴あけ位置を正確に設定することができます。作業員は車両の後ろを追従し、マーキングされた箇所にすぐさまドリル加工を行います。この工程は各設置ポイントごとに繰り返され、ロボットと人間が安全に近接して作業することができます。
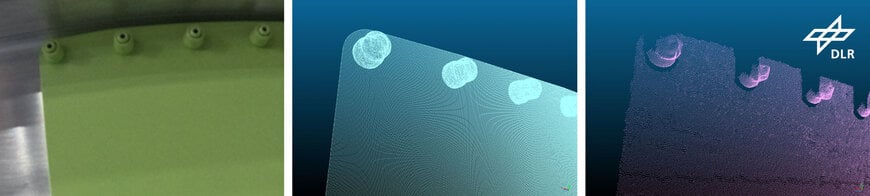
リベット付きプレートの比較表示:実際のプレート(左)、CAD点群(中央)、3Dカメラ点群(右)
航空機製造における本用途では、撮影位置から穴あけ位置までの経路をなるべく短くするため、ワーキングディスタンスが非常に短いコンパクトカメラが必要となります。そうすることで高い精度を維持し、ロボットの過剰な動作を回避できます。Ensenso N36はこの要件を満たしています。Ensenso Nシリーズは、厳しい環境条件下での使用を想定して特別に開発されています。コンパクトな設計により、カメラは省スペースで設置することが可能です。固定設置も、ロボットアームへの取り付けも可能です。そのため、移動体・静止物の3Dキャプチャのどちらにも適しています。内蔵プロジェクターは、厳しい照明環境下でも高コントラストなテクスチャを実現します。ランダムドットパターンのマスクを用いて対象物表面に追加構造を投影し、欠けている特徴や弱い特徴を補完します。すべてのカメラは工場出荷時にあらかじめキャリブレーションされており、すぐに簡単に運用を開始できます。
製造現場にもたらすメリット
このデジタルプロセスは、DLRにいくつかのメリットがあります。カメラベースの位置合わせは、精度と再現性を大幅に向上させます。同時に、継続的なデータ取得により、すべての工程の完全な記録とトレーサビリティが実現されます。位置決めのような時間のかかる作業をロボットが代行することで、作業者の負担が軽減され、熟練工は実際の組立作業に集中できます。さらに、手動での採寸や再調整が不要となるため、生産時間が大幅に短縮されます。
目標値と実測値の比較点群
今後の展望
このモックアップを用いた実証実験は、デジタルプロセスチェーン・ロボティクス・3D画像処理を組み合わせることによって生まれる可能性を、明確に示しました。今後のプロジェクトでは、システムの精度や評価アルゴリズムの性能について、さらに詳細な検証を行います。検証対象はカメラだけでなく、理論上の点群と実際の点群を整合させる数学的手法の最適化も含まれます。
現在航空機製造で試験中の技術は、将来的には他の産業分野にも応用される可能性があります。このシステムは、光学センサー技術とインテリジェントソフトウェアによる、ネットワーク化された効率的で高精度な製造の新時代の到来を明確に示しています。
プロジェクト動画: https://www.youtube.com/watch?v=rtJUdiuvUOU
画像の権利:
ドイツ航空宇宙センター(DLR), all rights reserved.
© 2026 IDS Imaging Development Systems GmbH
クライアント
![]()
ドイツ航空宇宙センター(DLR)は、ドイツ連邦共和国の航空宇宙研究機関です。航空・宇宙・エネルギー・交通・セキュリティ分野における研究開発活動を行い、国内外のパートナーと連携しています。
https://www.dlr.de/en
Project DiCADeMA
カメラ

Ensenso 3D カメラ
使用モデル:Ensenso N36
Ensenso N シリーズ
