
www.engineering-japan.com
14
'22
Written on Modified on
HMS Industrial Networks: モバイルロボットのメーカーが直面する通信および安全面の課題
いまやモバイルロボットが、倉庫から病院、さらには路上でも、あらゆる場所で見受けられるようになりました。人気があるのもよくわかります。より低価格で安全が高まり、購入しやすくなったうえ、実際の作業者よりも生産性に優れています。

また、拡張や他の機械との連携も容易です。さらに、モバイルロボットを通じて多くのリアルタイムデータが取集できることから、社内でIIoTに取り組み始めようという場合にもモバイルロボットは活躍するでしょう。
しかし、モバイルロボットが効率よく機能するには、安全性と確実な通信が必要です。このホワイトペーパーではモバイルロボットのメーカーが直面する通信や安全面の主な課題をまとめ、そうした課題を克服してモバイルロボットの走行を常に維持するための簡単な方法を紹介します。
モバイルロボットとは?
まず最初に、ここでのモバイルロボットが何を指すかを明確にしておきたいと思います。
モバイルロボットとは、ある場所から別の場所に荷物を搬送するロボットであり、無人搬送車(automated guided vehicle:AGV)と自律走行搬送ロボット(autonomous mobile robot:AMR)という2つのタイプがあります。AGVは、誘導設備(ワイヤ状を含めた反射板や磁気テープなど)を使って、あらかじめ決めた経路を走行させます。AGVの経路に障害物があると、AGVは停止してその障害物が取り除かれるのを待ちます。
一方のAMRは、もっとダイナミックです。マップによって誘導し、カメラや内蔵のセンサ、レーザースキャナなどから得たデータを使って周囲の状況を判断して最も効率的な経路を決定します。AMRの予定経路に障害物があった場合は、別の経路を選択します。AMRは誘導設備を頼らないため、より迅速に導入でき、物流上の変更にも適応可能です。
モバイルロボットとは、ある場所から別の場所に荷物を搬送するロボットであり、無人搬送車(automated guided vehicle:AGV)と自律走行搬送ロボット(autonomous mobile robot:AMR)という2つのタイプがあります。AGVは、誘導設備(ワイヤ状を含めた反射板や磁気テープなど)を使って、あらかじめ決めた経路を走行させます。AGVの経路に障害物があると、AGVは停止してその障害物が取り除かれるのを待ちます。
一方のAMRは、もっとダイナミックです。マップによって誘導し、カメラや内蔵のセンサ、レーザースキャナなどから得たデータを使って周囲の状況を判断して最も効率的な経路を決定します。AMRの予定経路に障害物があった場合は、別の経路を選択します。AMRは誘導設備を頼らないため、より迅速に導入でき、物流上の変更にも適応可能です。
モバイルロボットのメーカーが直面する通信や安全面の課題とは?
1. ワイヤレス接続の確立
モバイルロボットのメーカーにとって、最初の課題は最適なワイヤレス技術を選定することです。一般的なアドバイスとしては、仕様を確定し、規格を評価したうえで最適な技術を選ぶことだと言えます。しかし残念ながら、モバイルロボットのメーカーが常にこれを行えるとは限りません。機械がどのような場所に置かれるかや、目的とするアプリケーションを正確かつ詳細に把握することができない場合が多いからです。
Bluetoothは混線せず安定した接続ができることから、これが最適な場合もあれば、他のアプリケーションでは高速でセキュアなセルラー接続が求められる場合もあります。いずれにしても、それぞれに特有の仕様に合わせて簡単に変更できるネットワーキング技術が、モバイルロボットのメーカーにとって有用と言えるでしょう。
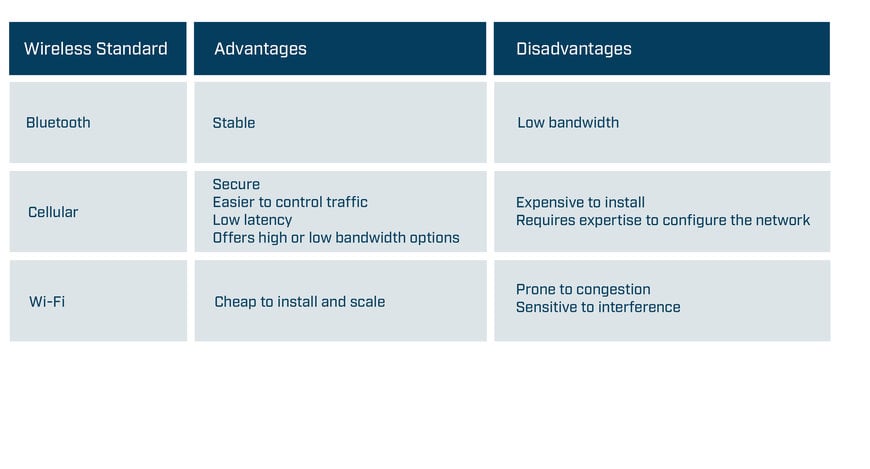
ワイヤレス通信規格の大きな利点と欠点
次の課題は、計画通りに設備が稼働するのを保証することです。ワイヤレスソリューションを設置する前に、モバイルロボットの可動域全体が十分な信号カバレッジに確実に収まるように施設の設計図をもとに現場の事前調査を行いましょう。特にこの現場調査では、アクセスポイントの最適な配置のほか、アンテナの適切なタイプとその角度や干渉を軽減する方法を明確にします。設置後には、無線アナライザーを使って計画通りになっているかをチェックし、必要があればアクセスポイントやアンテナを調整しましょう。
2. モバイルロボットを産業用ネットワークに接続する
2. モバイルロボットを産業用ネットワークに接続する
モバイルロボットはその施設に置かれたコントローラーと通信する必要がありますが、モバイルロボットとコントローラーが異なる産業通信プロトコルを利用していることが多くあります。たとえば、AGVはCANopenであるのに、コントローラーはPROFINETを使っているかもしれません。そのうえ、モバイルロボットのメーカーは同機種のAGVを、EtherCATなど別の産業用ネットワークを使うコントローラーが設置された施設で使いたいと考えることもあります。
モバイルロボットのメーカーはまた、自社のモバイルロボットが必要なデータ量を処理できる十分な能力を確実に備えているようにしなければなりません。この必要なデータ量は、設備の規模や種類によって異なります。大規模な設備では経路決定アルゴリズムによってより広いエリアを多くのロボットでカバーする必要があり、見込まれる経路も増えますので、より多くのデータを使うことになるでしょう。また、視覚などを利用したナビゲーションシステムでは画像処理を行います。そのため、反射板などによる他のナビゲーションシステムを使う設備以上に処理応力を高める必要があります。こうしたことから、モバイルロボットのメーカーは以下のような課題の解決を迫られます。
モバイルロボットのメーカーはまた、自社のモバイルロボットが必要なデータ量を処理できる十分な能力を確実に備えているようにしなければなりません。この必要なデータ量は、設備の規模や種類によって異なります。大規模な設備では経路決定アルゴリズムによってより広いエリアを多くのロボットでカバーする必要があり、見込まれる経路も増えますので、より多くのデータを使うことになるでしょう。また、視覚などを利用したナビゲーションシステムでは画像処理を行います。そのため、反射板などによる他のナビゲーションシステムを使う設備以上に処理応力を高める必要があります。こうしたことから、モバイルロボットのメーカーは以下のような課題の解決を迫られます。
- あらゆる主要なフィールドバスや産業用Ethernetネットワークをサポートしたネットワーキング技術が必要になる。
- モバイルロボットのハードウェアを設計変更することなく、コントローラーと同じ産業用ネットワークで通信可能なネットワーキング技術に簡単に変更できるようにする必要がある。
- 必要なデータを処理できる十分な能力と機能をネットワーキング技術が備えていることを保証する必要がある。
3. 安全なシステムを構築する
モバイルロボットが安全に荷物を搬送できるシステムを構築することは極めて重要ですが、これは難しい作業です。モバイルロボットのメーカーは、多岐にわたるモバイルロボットの種類や利用環境の構造と人員をすべて考慮したシステムを造りあげる必要があるからです。また、モバイルロボットは、誰かが安全ドアを開けたり、非常停止ボタンを押したりといった外的作用に対応可能であること、そしてネットワーキングソリューション側でも様々な安全プロトコルやインターフェースを処理できるように保証しなければなりません。特にARMは自由に走行しますので、それに応じた衝突リスクを管理する必要があります。センサに使われる技術は日々進化していますので、モバイルロボットのメーカーもこうした発展に合わせて、それぞれの製品が可能な限り効率的になるよう維持していかなければなりません。
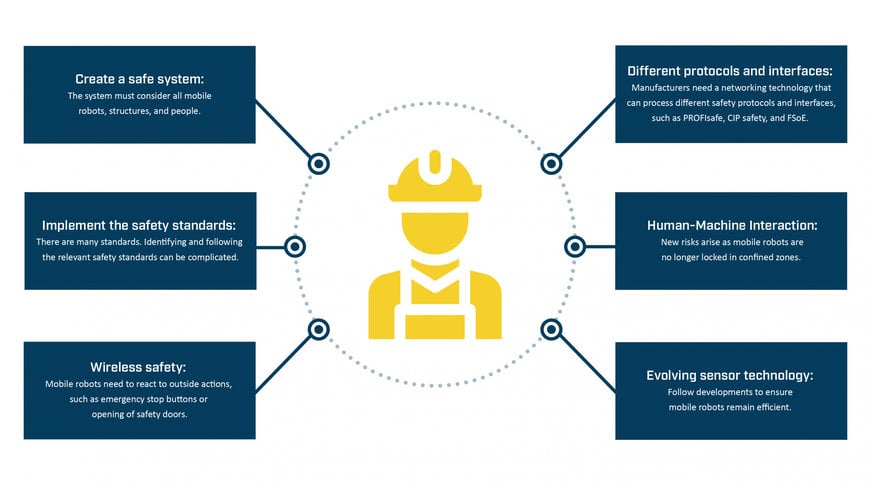
モバイルロボットのメーカーから見た安全性問題の概要
安全規格
安全規格として、安全に関する要素の実装や環境の整備、機械・設備の保守に関するガイドラインが定められています。
こうした様々な安全規格(ISOやDIN、IEC、ANSIなど)への準拠は、そのほとんどが任意です。しかし、EU諸国の機械メーカーは法律上、EUの機械指令(Machinery Directive)の安全基準に従う必要があります。なかでも機械指令200642ECは常にモバイルロボットのメーカーの適用対象となり、一部のアプリケーションでは、機器の電磁両立性を規制する機械指令201430EUがかかわってくることもあります。機械指令200642ECは、欧州市場で発売する安全機械の設計・製造に関する仕様を規定しています。この指令の仕様を満たしていることを適合宣言書として証明できるメーカーに限って、機械にCEマークを貼ってお客様に納入することができます。
その他の安全規格については義務ではありませんが、機械指令200642ECの仕様を満足するのに役立つため、メーカーとしてはそうした他の規格にも従うべきでしょう。たとえば、ISO 12100規格の指針に従えば、特定のリスクを削減して、残るのは許容可能なリスクだけにできます。また、ISO 13849やIEC 62061規格を利用すると、それぞれのリスクに必要な安全水準を判断して、それに対応した安全関連機能によって所定の仕様を確実に満たすことが可能です。このとき、モバイルロボットのメーカーはどのようにして特定の安全水準が達成するかを決定します。たとえば、モバイルロボットの速度を落として、衝突リスクや人が被るケガの程度を許容レベルまで下げる場合があります。あるいは、モバイルロボットが稼働するエリアを分離・限定して、そこへの人の立入りを禁止する(ISO 3691-4が定める隔離区域)こともあります。
こうした様々な安全規格(ISOやDIN、IEC、ANSIなど)への準拠は、そのほとんどが任意です。しかし、EU諸国の機械メーカーは法律上、EUの機械指令(Machinery Directive)の安全基準に従う必要があります。なかでも機械指令200642ECは常にモバイルロボットのメーカーの適用対象となり、一部のアプリケーションでは、機器の電磁両立性を規制する機械指令201430EUがかかわってくることもあります。機械指令200642ECは、欧州市場で発売する安全機械の設計・製造に関する仕様を規定しています。この指令の仕様を満たしていることを適合宣言書として証明できるメーカーに限って、機械にCEマークを貼ってお客様に納入することができます。
その他の安全規格については義務ではありませんが、機械指令200642ECの仕様を満足するのに役立つため、メーカーとしてはそうした他の規格にも従うべきでしょう。たとえば、ISO 12100規格の指針に従えば、特定のリスクを削減して、残るのは許容可能なリスクだけにできます。また、ISO 13849やIEC 62061規格を利用すると、それぞれのリスクに必要な安全水準を判断して、それに対応した安全関連機能によって所定の仕様を確実に満たすことが可能です。このとき、モバイルロボットのメーカーはどのようにして特定の安全水準が達成するかを決定します。たとえば、モバイルロボットの速度を落として、衝突リスクや人が被るケガの程度を許容レベルまで下げる場合があります。あるいは、モバイルロボットが稼働するエリアを分離・限定して、そこへの人の立入りを禁止する(ISO 3691-4が定める隔離区域)こともあります。
適切な規格を判断し、その仕様を実装するのが、モバイルロボットのメーカーが安全なシステムを構築するうえで最良の方法です。しかしながら、本ホワイトペーパーから分かるように、それは複雑で時間のかかる作業になります。
4. 信頼できるCAN通信を実現する
1980年代以降、信頼でき簡単に実装可能な規格として、今なおCAN技術をベースとした通信の普及が続いています。その主な理由は、Eモビリティや定置用大型蓄電システム(Battery Energy Storage System:BESS)など、急成長する様々な産業で利用されているからです。CANはシンプルで費用対効果が高く、省エネです。ネットワーク上の全デバイスがすべての情報にアクセスできるうえ、オープン規格であることから、ユーザーはそれぞれのニーズに合わせてメッセージを改良・拡張することもできます。
モバイルロボットのメーカーにとり、こうしたCAN接続の構築が以前にも増して欠かせないものとなりつつあります。既存システムの改良でも、新規設置でも、モバイルロボットの駆動システムでの利用が増えているリチウムイオン電池のモニタリングが可能になるからです。そこで、モバイルロボットのメーカーには以下の対応が求められます。
1. CANあるいはCANopen通信規格に対する信頼性の高い接続を確立して、バッテリーの状態や性能をモニタリングするなど、それぞれのデバイスをチェックできるようにすること。
2. 電磁干渉(EMI)によってシステムの電子機器が破損する可能性があるため、そのEMIからシステムを保護すること。EMIのリスクは、通信ケーブルに接するかたちでバッテリーを置くなど、新しい部品を追加するような改造を行った場合に顕著であり、高周波数の電磁妨害を招く結果になります。
2. 電磁干渉(EMI)によってシステムの電子機器が破損する可能性があるため、そのEMIからシステムを保護すること。EMIのリスクは、通信ケーブルに接するかたちでバッテリーを置くなど、新しい部品を追加するような改造を行った場合に顕著であり、高周波数の電磁妨害を招く結果になります。
5. モバイルロボットへのリモートアクセス
機械の制御システムにリモートアクセスが可能なら、モバイルロボットのメーカーやエンジニアは現地に出向かなくても不具合対策を行ったり、多くの問題を解決できるようになります。
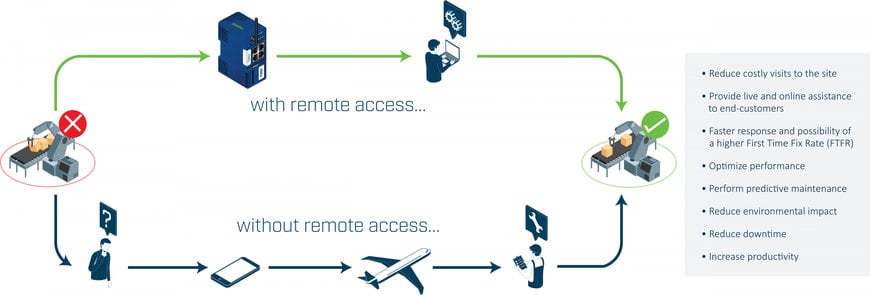
リモートアクセスのメリット
このとき課題となるのが、IT部門のニーズとエンジニアやメーカーのニーズとの間でバランスの取れたリモート接続ソリューションを構築することです。
IT部門は、ネットワークを安全かつ確実に維持して、インテグリティを保ちたいと考えますので、リモート接続ソリューションとしては、以下のようなセキュリティ対策を盛り込むことになるでしょう。
- インバウンド接続ではなく、アウトバウンド接続を利用してファイアウォールへの影響を最小限に抑える
- 関連する通信トラフィックをネットワークの他のトラフィックと分離する
- 全てのトラフィックを暗号化して保護し、機密性とインテグリティを保証する
- メーカーは、確実にISO 27001などの関連するセキュリティ規格に従った取組みを行うか、認証を取得する
- サプライヤは定期的にセキュリティ監査を受け、それを確実に通過する
一方のエンジニアやメーカーは、使いやすく信頼できるシステムを望んでいます。ユーザーがモバイルロボットに簡単に接続して、必要な情報にアクセスできるようにしたいと考えているのです。また、設備が変更になる場合にも、必要なロボットの数を簡単に拡張できるようにすべきです。モバイルロボットはメーカーやエンジニアとは別の国で利用されることもありますので、ネットワーキングのためのインフラは、十分なカバレッジと冗長性をもち世界中で利用できることを保証しなければなりません。
まとめ
ここまで見てきたように、モバイルロボットのメーカーは通信や安全性について多くの課題を解決しなければなりません。ワイヤレス接続を確立して、様々なネットワークを跨いでデータを送信し安全性を確保するほか、CANシステムに接続して遠隔からロボットにセキュアにアクセスできるようにする必要もあります。そのうえ状況を複雑にしているのが、それぞれの設備を再評価して、導入現場の要件に合わせた改造をしなければならないことです。
モバイルロボット通信を実現する最適な方法
モバイルロボットのメーカーが通信や安全性の専門家であるとは限りません。そのため、必要な通信技術を社内で開発しようというのは時間がかかり高コストになることはお分かりいただけるでしょう。これに対し、サードパーティ製の専用通信ソリューションを活用すると通信にかかわる問題が解消できるだけでなく、他のメリットも得られます。
最新の通信ソリューションにはモジュール設計が採用されており、モバイルロボットのメーカーは機械の他の部分にまったく影響を与えることなく、ある規格やプロトコル用に設計されたネットワーキング製品を他の規格やプロトコル用の製品で置き換えることができます。たとえば、ある設備ではBluetoothが最適なワイヤレス規格であるかもしれませんが、他の場所ではカバレッジの点でWi-Fiの方が優れているという場合があります。同様に、PROFINETとPROFIsafeプロトコルを利用している工場がある一方で、他の工場では異なる産業通信用プロトコルや安全プロトコルが利用されています。いずれのケースでも、モバイルロボットのメーカーが通信の専用製品を利用すれば、現場の要件に見合うようにネットワーク技術を変更できるのです。しかもハードウェア設計の変更はいっさい必要ありません。
ここまで見てきたように、モバイルロボットのメーカーは通信や安全性について多くの課題を解決しなければなりません。ワイヤレス接続を確立して、様々なネットワークを跨いでデータを送信し安全性を確保するほか、CANシステムに接続して遠隔からロボットにセキュアにアクセスできるようにする必要もあります。そのうえ状況を複雑にしているのが、それぞれの設備を再評価して、導入現場の要件に合わせた改造をしなければならないことです。
モバイルロボット通信を実現する最適な方法
モバイルロボットのメーカーが通信や安全性の専門家であるとは限りません。そのため、必要な通信技術を社内で開発しようというのは時間がかかり高コストになることはお分かりいただけるでしょう。これに対し、サードパーティ製の専用通信ソリューションを活用すると通信にかかわる問題が解消できるだけでなく、他のメリットも得られます。
最新の通信ソリューションにはモジュール設計が採用されており、モバイルロボットのメーカーは機械の他の部分にまったく影響を与えることなく、ある規格やプロトコル用に設計されたネットワーキング製品を他の規格やプロトコル用の製品で置き換えることができます。たとえば、ある設備ではBluetoothが最適なワイヤレス規格であるかもしれませんが、他の場所ではカバレッジの点でWi-Fiの方が優れているという場合があります。同様に、PROFINETとPROFIsafeプロトコルを利用している工場がある一方で、他の工場では異なる産業通信用プロトコルや安全プロトコルが利用されています。いずれのケースでも、モバイルロボットのメーカーが通信の専用製品を利用すれば、現場の要件に見合うようにネットワーク技術を変更できるのです。しかもハードウェア設計の変更はいっさい必要ありません。
筆者:
Mark Crossley、Daniel Heinzler、Fredrik Brynolf、Thomas Carlsson
HMS Networks
HMS Networksは、スウェーデンを拠点とする産業用通信のエキスパートとして、AGVの通信に向けた多数のソリューションをご用意しています。詳しくは、www.hms-networks.comagvをご覧ください。
