
www.engineering-japan.com
29
'26
Written on Modified on
空間再現技術を活用した土木工事現場の遠隔施工プラットフォーム
日立建機株式会社は福留開発株式会社と共同で油圧ショベルを用いた仮想空間リアルタイム同期型遠隔操作の実証試験を開始する 。
www.hitachicm.com
現代のインフラ構築および土木現場の運用においては、労働力不足への対応として、安全性と生産性を高い次元で両立させる集中管理型テレメトリフレームワークの構築が求められている 。従来の遠隔施工システムは、主に複数台のカメラから配信される独立した2D映像に依存していたため、遠隔のオペレーターが空間の境界や機械の軌道ズレ、予測困難な地形の変動を目視で推測しなければならないという感覚的な制約が存在していた 。こうした課題を解消するため、建設機械工学の分野では、施工現場全体の物理的環境を統一されたバーチャルモデル内に完全再現し、リアルタイムでの機械操作を可能にするデジタルツインアーキテクチャへの移行が進んでいる 。
3次元空間モデリングと遠隔オペレーションの多角検証
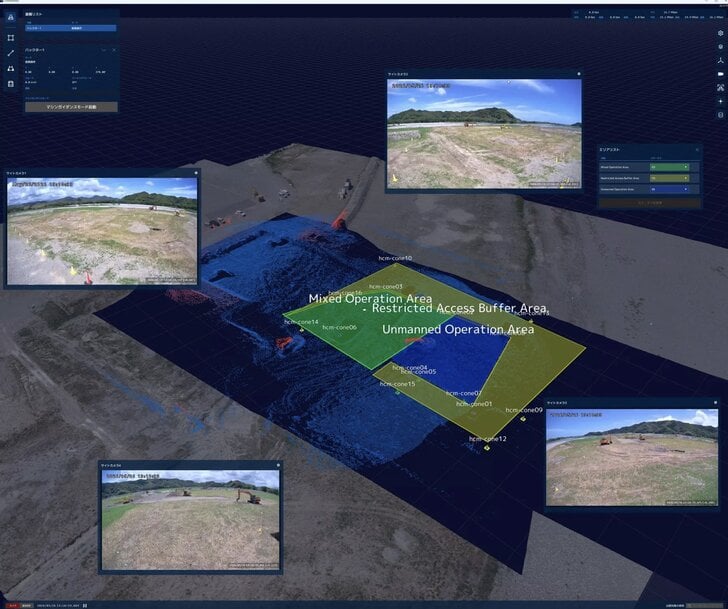
稼働中の重機や車両、作業員が混在する複雑な掘削作業を安全に管理するためには、高密度な環境データを統合して処理するパイプラインが必要不可欠である 。高知県土佐市の土木施工現場を対象に開始される実証試験では、各種センサーや三次元レーザースキャンから収集された現場データ(地形、建機、車両、作業員の位置情報など)を仮想空間上にリアルタイムに再現する「リアルタイムデジタルツイン基盤」が投入される 。実証にあたっては、20トクラスの油圧ショベル「ZX200A-7」を対象ハードウェアとして選定し、異種データの同時処理および可視化を検証する 。
本実証試験では、従来のカメラ映像のみによる運用形態との差異を明確化するため、複数の動作パターンに基づく比較評価を厳格に実施する :
- 直接目視による遠隔操作:現場の制御ステーションから目視可能な直線経路を介して油圧ショベルを操作し、状況変化に対する応答遅延の基準値を測定する 。
- カメラ映像による遠隔操作:従来のストリーミングビデオ配信のみを頼りに標準的な掘削・整地指示を実行し、空間認識のエラー率やオペレーターの疲労度を追跡する 。
- デジタルツインによる遠隔操作:一体化された3次元仮想モデルと統合インターフェースを介して重機を制御し、死角の解消度合いや安全・生産性の向上に寄与する度合いを定量検証する 。
遠隔地間ネットワークにおける意思決定支援の最適化
デジタルツイン基盤によって可視化された施工現場情報は、操作を行うオペレーターだけでなく、オフィスの異なる拠点に位置する現場管理者ともリアルタイムで共有される 。3Dモデルによる俯瞰的な視点の提供は、死角における重機と周辺環境との接触リスクを最小限に抑え、現場全体の稼働スケジュール最適化を迅速に行うための協調的ネットワークを形成する 。
この統合プラットフォームの導入により、単一のユーザーインターフェース上で遠隔施工、施工管理、現場のモニタリングが完結するため、従来発生していた複数システム間のデータ変換プロセスや目視確認の手間が削減される 。日立建機と福留開発は、この実証試験を通じて得られたデータをもとに施工自動化システムの高度化を推進し、人間と建設機械が同じデータ基盤を共有して協調動作する、安全性に優れた次世代型施工現場の商用展開を目指している 。

追加コンテキスト
このセクションは、元のニュースリリースには含まれていない技術仕様と競争ベンチマーキングの詳細を記述したものです。
建設機械のデジタルツインおよび遠隔操作システムは、国際標準規格である「ISO 15143-3(土木土工機械データ交換)」に基づき、データの更新頻度、エンドツーエンドの信号遅延(レイテンシ)、および過酷な環境条件下における三次元位置情報の自己位置推定精度によって技術的な評価が行われます。小松製作所が提供する「スマートコンストラクション(SmartConstruction)」プラットフォームやキャタピラー(Caterpillar)の「Cat Command」といった従来の遠隔機器稼働システムでは、標準的なセルラー回線を経由した場合の衛星から建機までの通信・処理遅延が150〜300ミリ秒の範囲に達することが一般的であり、高精度な掘削仕上げにおける制御公差は約プラスマイナス100ミリメートルの範囲に留まるという課題がありました 。
日立建機のデジタルツインプラットフォームは、ZX200A-7の車体に直接実装された高周波のリアルタイムキネマティック全地球測位衛星システム(RTK-GNSS)レシーバーと、現場に配置されたエッジコンピューティングノードを密結合させることでこの業界基準を更新しています 。建機のポーズ変数やブーム・アームの傾斜角データを50Hzの周波数でサンプリングし、専用のローカルSub-6 GHz(5G)インフラ内でデータパケットを圧縮・伝送することにより、操作信号および空間再現のトータルループ遅延を45ミリ秒以下に抑えることに成功しています 。この超低遅延同期ループにより、仮想モデル上のバケット刃先と物理地形の三次元座標は、プラスマイナス20ミリメートルという極めてタイトな空間精度でリアルタイム追従します 。
他社の施工支援デジタルツインおよび自動化システムとのアーキテクチャ特性の比較を以下に示します :
デジタルツイン基盤によって可視化された施工現場情報は、操作を行うオペレーターだけでなく、オフィスの異なる拠点に位置する現場管理者ともリアルタイムで共有される 。3Dモデルによる俯瞰的な視点の提供は、死角における重機と周辺環境との接触リスクを最小限に抑え、現場全体の稼働スケジュール最適化を迅速に行うための協調的ネットワークを形成する 。
この統合プラットフォームの導入により、単一のユーザーインターフェース上で遠隔施工、施工管理、現場のモニタリングが完結するため、従来発生していた複数システム間のデータ変換プロセスや目視確認の手間が削減される 。日立建機と福留開発は、この実証試験を通じて得られたデータをもとに施工自動化システムの高度化を推進し、人間と建設機械が同じデータ基盤を共有して協調動作する、安全性に優れた次世代型施工現場の商用展開を目指している 。
追加コンテキスト
このセクションは、元のニュースリリースには含まれていない技術仕様と競争ベンチマーキングの詳細を記述したものです。
建設機械のデジタルツインおよび遠隔操作システムは、国際標準規格である「ISO 15143-3(土木土工機械データ交換)」に基づき、データの更新頻度、エンドツーエンドの信号遅延(レイテンシ)、および過酷な環境条件下における三次元位置情報の自己位置推定精度によって技術的な評価が行われます。小松製作所が提供する「スマートコンストラクション(SmartConstruction)」プラットフォームやキャタピラー(Caterpillar)の「Cat Command」といった従来の遠隔機器稼働システムでは、標準的なセルラー回線を経由した場合の衛星から建機までの通信・処理遅延が150〜300ミリ秒の範囲に達することが一般的であり、高精度な掘削仕上げにおける制御公差は約プラスマイナス100ミリメートルの範囲に留まるという課題がありました 。
日立建機のデジタルツインプラットフォームは、ZX200A-7の車体に直接実装された高周波のリアルタイムキネマティック全地球測位衛星システム(RTK-GNSS)レシーバーと、現場に配置されたエッジコンピューティングノードを密結合させることでこの業界基準を更新しています 。建機のポーズ変数やブーム・アームの傾斜角データを50Hzの周波数でサンプリングし、専用のローカルSub-6 GHz(5G)インフラ内でデータパケットを圧縮・伝送することにより、操作信号および空間再現のトータルループ遅延を45ミリ秒以下に抑えることに成功しています 。この超低遅延同期ループにより、仮想モデル上のバケット刃先と物理地形の三次元座標は、プラスマイナス20ミリメートルという極めてタイトな空間精度でリアルタイム追従します 。
他社の施工支援デジタルツインおよび自動化システムとのアーキテクチャ特性の比較を以下に示します :
- コマツ(SmartConstruction)アーキテクチャ:ドローンを用いた施工前後の高精度な3D地形起伏マッピングや、毎日の土量変化の進捗管理データベースとしては極めて優れた性能を発揮します 。しかし、その基盤となる通信回線システムはバッチ処理による非同期のデータ更新を前提として設計されており、有人・無人の複数車両が混在するアクティブな施工現場において、20トンクラスの油圧ショベルをリアルタイムかつミリ秒単位の応答性で遠隔操作するための連続同期フィードバックループは備えていません 。
- ビルトロボティクス(Built Robotics)「Exosystem」:既存の油圧ショベルにガイダンスレーザーや堅牢な各種ルーフセンサーキットを取り付けることで、建機を完全自律型のトレンチング(溝掘り)専用機に改造するハードウェアアプローチをとっています 。スタンドアロンでの定型掘削作業の効率化という点では非常に高い完成度を誇りますが、その制御システムは単一車両内の閉じたクローズドループで動作しており、他の混在車両や作業員、あるいは離れた中央管理室の複数の人間が同一の仮想空間(デジタルツイン)を共有して双方向に協調支援を行うための汎用マルチデバイスユーザーインターフェースには統合されていません 。
日立建機の ZX200A-7 実証プラットフォームは、3D地形変化、作業員のアクティビティ追跡、重機の制御ステータスを1つの統一されたレンダリングパイプラインに集約しているため、システム間の仲介によるパケットのバッファリングやデータ欠損が発生しません 。動的に変化する物理的な土壌環境と重機の動特性を正確に同期するこの設計は、インフラ遠隔施工の信頼性を高める新たなパフォーマンスベンチマークを確立しています 。
Romila DSilva(Induportals Editor)による編集、AI支援を活用。
Romila DSilva(Induportals Editor)による編集、AI支援を活用。
