
www.engineering-japan.com
17
'26
Written on Modified on
シュマルツ、柔軟なワーク搬送を実現するmGrip Basicフィンガーグリッパーを発表
新しいmGrip BasicとSRCU Basic制御モジュールにより、食品・包装・物流分野で不定形かつ繊細なワークの自動搬送をシンプルかつ経済的に実現。
www.schmalz.com
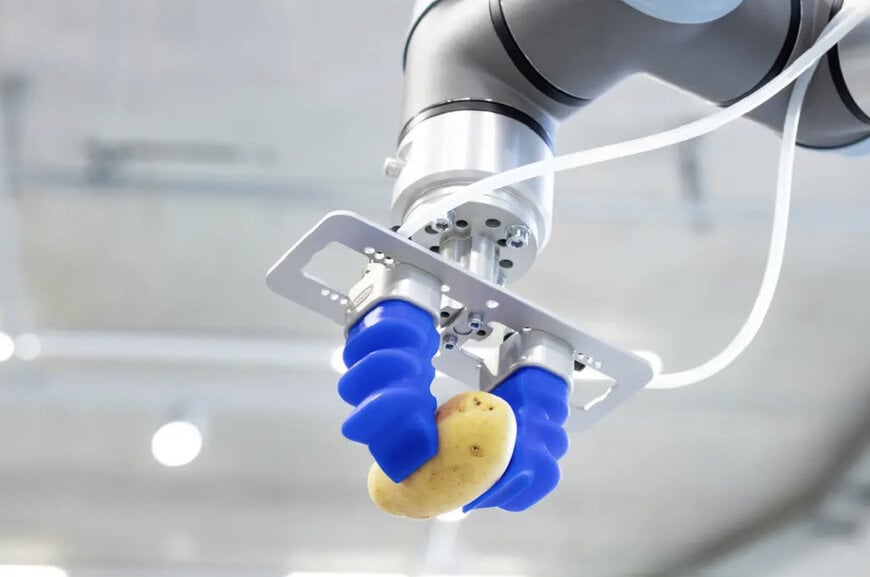
シュマルツ株式会社は空気圧式フィンガーグリッパーおよび専用制御モジュールを発表し、デジタルサプライチェーンにおける不定形かつ繊細な製品の自動ハンドリング性能を向上させます。
変種変量生産に対応するデジタルサプライチェーンの構築
食品加工、農業、包装、そして物流分野における自動化プロセスでは、形状が不規則で壊れやすいワークの搬送が常に課題となっています。新しい空気圧式ハンドリングシステムは、これらの不定形な品物を損傷なく高速で移動させることで、自動化への投資対効果を最適化し、デジタルサプライチェーン全体の流通効率を高めます。従来の金属製機械式グリッパーでは対応できなかったブリスターパック、ネット包装、農産物などを確実に把持し、手動による仕分け工程を自動化ラインへ移行させます。
対象となるワークは、焼き菓子、乳製品、果物などの表面がデリケートな品物です。弾性体のフィンガーモジュールがワークの輪郭に沿って密着するため、局所的な応力集中を防ぎ、製品に傷や変形跡を残さない高品質な搬送作業を維持します。

モジュール設計による段替え時間短縮とシステム統合
この把持機構はモジュール構造を採用しており、製造ラインの変更に伴う治具の段替え時間を最小限に抑える設計となっています。内部の取付部品を調整することにより、グリッパーのベースプレート全体を交換することなく、指状モジュールの配置位置や対向距離を迅速に変更可能です。
- 迅速なハードウェア構成変更:ワークのサイズや質量変化に応じて指の枚数や間隔を調整できるため、多品種の製品が混在する製造ラインでも段替えコストを抑制します。
- 堅牢な圧力制御システム:専用の制御モジュールには手動の圧力調整ハンドルと内部減圧弁が組み込まれており、供給空気圧を制限して弾性体への過負荷を自動的に防止します。
実際の産業用途において、このシステムは自動車データエコシステムや高度な物流搬送ロボットと連携して動作します。例えば、毎分120回の高速ピックアンドプレースを要求される仕分けラインでは、真空スイッチが現在の圧力値をリアルタイムで監視し、最適な把持力を維持します。これにより、多軸ロボットアームが急加速・急減速する環境下でも、クロワッサンや鶏肉といった滑りやすく不定形な対象物を落とさずに正確にコンベアへ配置でき、オペレーターの監視負担を軽減します。

アプリケーションデータの共有と運用の信頼性
ハードウェアの提供だけでなく、実際の検証データを集約した動画プラットフォームを通じて、100以上の具体的な運用事例をユーザーに開示しています。産業分野やワークの物理特性ごとに最適化された設定パラメータを参照できるため、個別の搬送システムを設計する際の実証実験期間を短縮できます。
制御モジュールはスタンドアロンで機能するため、既存の製造ラインや自社製ハンドへ容易に組み込むことが可能です。機械的な摩耗部品を最小限に抑えた弾性体構造と自動減圧機能の組み合わせにより、長期間にわたる連続稼働時でも高いシステム稼働率と信頼性を確保します。

追加のコンテキスト:
本セクションでは、元の製品発表には含まれていない技術仕様および競合ベンチマークの詳細を説明します。
この空気圧式フィンガーグリッパーシステムは、ソフトロボティクス市場において、ソフト・ロポティクス社の「mGrip」シリーズ(シュマルツが技術統合したものを含む)や、Festo(フェスト)のバイオニックハンドリングソリューション、またオンロボット(OnRobot)のソフトグリッパーと直接競合します。
競合製品との技術的な評価基準として、空気圧による把持力制御の応答性と、モジュール交換時の再現精度が挙げられます。オンロボットのシリコン製ソフトグリッパーは、交換可能な3種類のシリコンカップを使用して食品加工に対応しますが、把持可能な最大重量やワークの直径寸法に対する柔軟性が限定される傾向にあります。これに対し、本製品はフィンガーモジュールの取り付け位置をベースプレート上で物理的にスライド調整できるため、外径の異なる包装製品への適合幅が広く設計されています。
さらに、フェストが展開するフィンガー追従型の柔軟グリッパーと比較した場合、本システムは毎分120ピックという高頻度の往復運動時における耐久性に優れています。フェストの構造は複雑な3次元動作を再現する反面、高速サイクル下での経年劣化が課題となるケースがありますが、本製品は構造を簡素化したモジュール構成と内部減圧弁による機械的ストレス緩和を組み合わせることで、連続稼働時のシールの摩耗を抑え、安定した長寿命特性を維持します。
Natania Lyngdoh(Induportals編集者)による編集。AI支援を使用。
www.schmalz.com
アプリケーションデータの共有と運用の信頼性
ハードウェアの提供だけでなく、実際の検証データを集約した動画プラットフォームを通じて、100以上の具体的な運用事例をユーザーに開示しています。産業分野やワークの物理特性ごとに最適化された設定パラメータを参照できるため、個別の搬送システムを設計する際の実証実験期間を短縮できます。
制御モジュールはスタンドアロンで機能するため、既存の製造ラインや自社製ハンドへ容易に組み込むことが可能です。機械的な摩耗部品を最小限に抑えた弾性体構造と自動減圧機能の組み合わせにより、長期間にわたる連続稼働時でも高いシステム稼働率と信頼性を確保します。
追加のコンテキスト:
本セクションでは、元の製品発表には含まれていない技術仕様および競合ベンチマークの詳細を説明します。
この空気圧式フィンガーグリッパーシステムは、ソフトロボティクス市場において、ソフト・ロポティクス社の「mGrip」シリーズ(シュマルツが技術統合したものを含む)や、Festo(フェスト)のバイオニックハンドリングソリューション、またオンロボット(OnRobot)のソフトグリッパーと直接競合します。
競合製品との技術的な評価基準として、空気圧による把持力制御の応答性と、モジュール交換時の再現精度が挙げられます。オンロボットのシリコン製ソフトグリッパーは、交換可能な3種類のシリコンカップを使用して食品加工に対応しますが、把持可能な最大重量やワークの直径寸法に対する柔軟性が限定される傾向にあります。これに対し、本製品はフィンガーモジュールの取り付け位置をベースプレート上で物理的にスライド調整できるため、外径の異なる包装製品への適合幅が広く設計されています。
さらに、フェストが展開するフィンガー追従型の柔軟グリッパーと比較した場合、本システムは毎分120ピックという高頻度の往復運動時における耐久性に優れています。フェストの構造は複雑な3次元動作を再現する反面、高速サイクル下での経年劣化が課題となるケースがありますが、本製品は構造を簡素化したモジュール構成と内部減圧弁による機械的ストレス緩和を組み合わせることで、連続稼働時のシールの摩耗を抑え、安定した長寿命特性を維持します。
Natania Lyngdoh(Induportals編集者)による編集。AI支援を使用。
www.schmalz.com
