
www.engineering-japan.com
24
'26
Written on Modified on
安川、柔軟な自動化のためのMotoman Next AIロボティクスプラットフォームを発売
革新的なプラットフォームは、高度な自律制御ユニットとセンサーを統合して、バイオ実験、ロジスティクス包装、透明材料のピッキングなどの複雑なプロセスを自動化します。
www.yaskawa.eu.com
株式会社安川電機は自律制御ユニット内蔵ロボットを開発し、細胞培養、多様な商品の箱詰め、および透明な積層容器のハンドリング工程における従来の人手依存作業の自動化を実現した。
導入企業の概要と自動化における課題
産業界では人手不足が深刻化する中、従来のルールベースの制御では対応が困難な、経験に基づく曖昧な判断や五感を要する作業の自動化が強く求められている。特にバイオテクノロジー分野における自然由来試料の細胞培養工程、ネットスーパーに代表される多品種商品の箱詰め工程、および食品・印刷分野における透明・不定形物のピッキング工程では、対象物の状態変化や多様性に柔軟に対応できる高度なシステムが必要とされていた。
各工程における改善目標
本ソリューションの導入にあたり、設定された具体的な改善目標は以下の通りである。
- 品質の安定化: バイオ実験において、作業者の習熟度による判断のばらつきを排除し、一貫した処理精度を確保する。
- 安全性の向上: 感染リスク等の危険を伴う試料のハンドリングから作業者を解放する。
- システムの簡素化: 多品種の商品を扱う箱詰め工程において、複雑なアルゴリズムを排除した実用的な制御モデルを構築する。
- 運用の平易化: 従来手法では認識困難であった透明な積層物のハンドリングを可能にし、専門知識を持たない現場担当者でも容易に運用できる環境を整える。
選択された技術的ソリューション
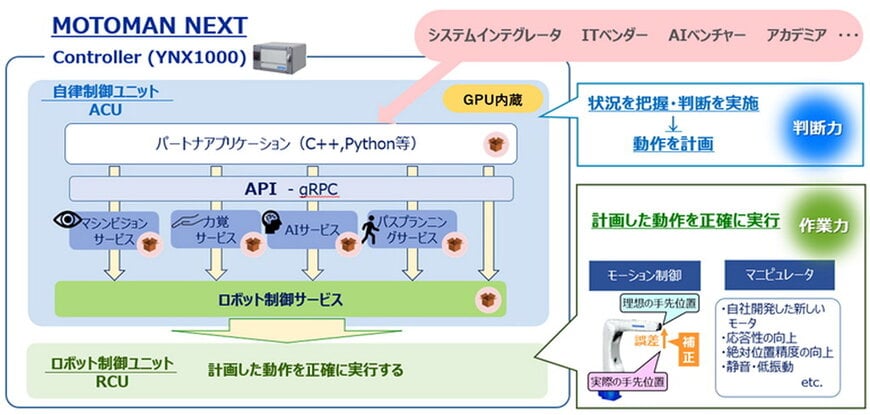
これらの課題を解決するため、自律制御ユニット(ACU)を内蔵したAIロボットプラットフォームが採用された。このシステムは、周辺環境の変化をリアルタイムに認識・判断し、動作計画から実行までをロボット単体で行う能力を持つ。
バイオ実験における細胞剥離工程
細胞の分散度合いや内容物の混ざり具合をカメラで撮像し、内蔵されたAIが細胞の塊の大きさや分布を解析する。システムは最適な剥離軌道を自律的に計画・実行し、未処理の塊が消失するまで工程を反復する。また、蓄積された作業データを活用したAIの再学習により、継続的な品質向上が可能な構造となっている。
多品種商品の箱詰め工程
製品のサイズ、重量、破損しやすさ等の属性情報に基づき、最適な取り出し順序と配置をAIが計画する。開発プロセスでは、仮想空間上でGPU高速処理による強化学習を実行し、短時間で効率的なAIモデルを構築した。作成されたモデルは内蔵ACUに直接実装され、実空間でのシームレスな運用が行われている。
透明・不定形物のピッキング工程
外部パートナー企業が開発した専用のソフトウェアパッケージをロボットプラットフォーム上に組み込み、箱の中に不規則に連なった状態で積層されている透明カップの視覚認識を行う。AIが安定して把持できる位置を正確に算出し、充填機や印刷機などの後続装置へ正確に整列・投入する。
選定の理由と技術的特長
本システムが選定された最大の要因は、AI処理に必要なGPU、視覚・力覚センサー機能、パスプランニング機能を標準搭載したオープンプラットフォームである点にある。外付けPCの導入が不要なため、システムの構成を簡素化し、導入・運用に伴う負荷を大幅に軽減できる。
また、シミュレータ環境(NVIDIA Isaac SimおよびNVIDIA Isaac Lab)との高い親和性により、注文パターンの変更や製品種類の追加が発生した場合でも、仮想環境内での迅速な検証と実機への即時適用が可能である。さらに、優れた汎用性により、サードパーティ製の専門的なソフトウェアパッケージや最新のデータ処理技術を容易に統合できる柔軟性が評価された。
導入の効果と運用の成果
本ソリューションの導入により、これまで人手に頼らざるを得なかった各工程において、自律的な自動化が達成された。
バイオ実験工程では、細胞の状態変化に応じた柔軟な動作計画が可能となり、属人的なばらつきのない安定した処理が実現した。箱詰め工程においては、複雑なルール設定を行うことなく、重量物を下層に、軽量・破損しやすい物品を上層に配置する人間の判断基準を高度に再現した。透明カップのピッキング工程では、専用のグラフィカルユーザーインターフェース(GUI)を組み合わせることで、AIロボットの運用経験がない現場作業者でも、容易なセットアップと安定したライン稼働が可能となった。
本技術は、今後さらに物流分野におけるトラックへの荷積み作業や、資源リサイクル分野における多種多様な材質の目視分別作業など、幅広い産業分野への応用が見込まれている。
編集:Evgeny Churilov, Induportals Media - AI適応版
www.yaskawa.co.jp
これらの課題を解決するため、自律制御ユニット(ACU)を内蔵したAIロボットプラットフォームが採用された。このシステムは、周辺環境の変化をリアルタイムに認識・判断し、動作計画から実行までをロボット単体で行う能力を持つ。
バイオ実験における細胞剥離工程
細胞の分散度合いや内容物の混ざり具合をカメラで撮像し、内蔵されたAIが細胞の塊の大きさや分布を解析する。システムは最適な剥離軌道を自律的に計画・実行し、未処理の塊が消失するまで工程を反復する。また、蓄積された作業データを活用したAIの再学習により、継続的な品質向上が可能な構造となっている。
多品種商品の箱詰め工程
製品のサイズ、重量、破損しやすさ等の属性情報に基づき、最適な取り出し順序と配置をAIが計画する。開発プロセスでは、仮想空間上でGPU高速処理による強化学習を実行し、短時間で効率的なAIモデルを構築した。作成されたモデルは内蔵ACUに直接実装され、実空間でのシームレスな運用が行われている。
透明・不定形物のピッキング工程
外部パートナー企業が開発した専用のソフトウェアパッケージをロボットプラットフォーム上に組み込み、箱の中に不規則に連なった状態で積層されている透明カップの視覚認識を行う。AIが安定して把持できる位置を正確に算出し、充填機や印刷機などの後続装置へ正確に整列・投入する。
選定の理由と技術的特長
本システムが選定された最大の要因は、AI処理に必要なGPU、視覚・力覚センサー機能、パスプランニング機能を標準搭載したオープンプラットフォームである点にある。外付けPCの導入が不要なため、システムの構成を簡素化し、導入・運用に伴う負荷を大幅に軽減できる。
また、シミュレータ環境(NVIDIA Isaac SimおよびNVIDIA Isaac Lab)との高い親和性により、注文パターンの変更や製品種類の追加が発生した場合でも、仮想環境内での迅速な検証と実機への即時適用が可能である。さらに、優れた汎用性により、サードパーティ製の専門的なソフトウェアパッケージや最新のデータ処理技術を容易に統合できる柔軟性が評価された。
導入の効果と運用の成果
本ソリューションの導入により、これまで人手に頼らざるを得なかった各工程において、自律的な自動化が達成された。
バイオ実験工程では、細胞の状態変化に応じた柔軟な動作計画が可能となり、属人的なばらつきのない安定した処理が実現した。箱詰め工程においては、複雑なルール設定を行うことなく、重量物を下層に、軽量・破損しやすい物品を上層に配置する人間の判断基準を高度に再現した。透明カップのピッキング工程では、専用のグラフィカルユーザーインターフェース(GUI)を組み合わせることで、AIロボットの運用経験がない現場作業者でも、容易なセットアップと安定したライン稼働が可能となった。
本技術は、今後さらに物流分野におけるトラックへの荷積み作業や、資源リサイクル分野における多種多様な材質の目視分別作業など、幅広い産業分野への応用が見込まれている。
編集:Evgeny Churilov, Induportals Media - AI適応版
www.yaskawa.co.jp
